


智能型阀门电动执行机构控制器的设计
2008/4/30 9:09:00
摘 要:介绍了一种阀门电动执行机构的智能控制器。该控制器采用MOTOROLA公司的8位微处理器作为控制单元,用电力电子器件作为电机驱动单元,完成了一个集自动控制、手动调节、状态检测等功能于一体的智能系统。该系统适用于各类工 业控制阀。
关键词:阀门电动执行机构;智能控制器;MC68HC908SR12
The design of an intelligent controller for use with electric valveactuators
ZHU Rongrong,ZHANG Shiwen;SHU Guohua
(Electrical & Electronic Techonlogy Center of Shanghai Jiaotong University,Shanghai 200240,China)
Abstract:An intelligent controller is designe d for use with electric valveactuators.The controller uses the 8bit MCU as a control unit and the power electronics as a motordrive unit.The system is pro vided with the integrated function of automatic and manual control and can also detect the state of the valve.The system is applicable to many kinds of industri al valve.
Key words:electric valveactuator;intelligent controller;MC68H C908SR12
0 引言
水、汽、油等流体与工业发展有着密切联系,而流体在工业上的应用离不开管网系统,有管网必然有阀门。随着工业自动化的发展,传统的手工机械调节方式在许多场合已不再适用。要实现管网系统的工业自动化管理,更是离不开电动阀门这个管网系统中的执行机构。在某些应用场合,对阀门的控制不仅仅是简单的开关控制,还涉及到开度控制以及流量等各种关 系控制,这对阀门电动执行机构控制器的智能性提出了更高的要求。文中应用微处理器设计了一种阀门控制系统实现了阀门执行机构控制的智能化。
1系统工作原理和功能
阀门的控制量为阀门开度,在应用场合往往会根据实际需要将阀门开或关,或者开到一定程度,甚至动态的以某种规律开关。在传统的模拟控制方式中用时间、电流的大小来表示阀门的开启角度。由于影响时间、电流(电压)等参数的因素很多,因此显示的开启角度与阀门的实际位置不易达到同步,经常出现明显的误差[3]。同时,简单的模拟量控制提供的信息极为有限,不利于系统的调试和检修。笔者设计的智能型控制系统采用数字化的方法来控制电动执行机构运行。其智能控制器系统构成如图1所示。
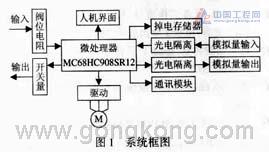
采用MOTOROLA公司单片微处理器和外围芯片组成智能化的位置控制单元,接收统一的标准直流信号(如4~20 mA的电流信号),经信号处理及A/D转换送至微处理器,微处理机将处理后的数据送至显示单元显示调节结果,运算处理后产生的控制信号驱动交流电机。此外,系统带通讯功能,可以接收上位机的指令,进行远程数字控制。同时也可以在智能控制器本地的人机界面上通过菜单和按钮实现现场手动控制。
主要功能描述:
(1)一体化结构设计,直接接收4~20 mA/4~12 mA/12~20 mA/0~5 V/1~5 V等控制信号,输出隔离的4~20mA阀位反馈信号;
(2)具有仿真运行功能,并可根据用户设定的流量特性曲线运行;
(3)控制信号断路故障判断、报警及保护功能。断路故障时可使执行机构或开、或关、或保特、或在0~100%之间预置的任意值;
(4)数字显示,显示控制信号值、阀位值、故障类别;
(5)RS485远程通讯功能,通过通讯协议在上位机进行编程组态,对过程量、开关量作数据或图形处理。
(6)阀门行程自整定,输入输出模拟信号自校准。
2 系统硬件组成
智能控制器根据智能化、可靠性高、抗干扰能力强、成本低等原则,控制核心采用8位微处理器MC68HC908SR12(SR12),电机控制的主电路采用电力电子技术实现。SR12具有速度快、功能强和价格低等特点。其最高工作频率可达8 MHz,有512字节的片内RAM、12K字节的片内FLASH存储器,14路10位A/D,及SCI、I2C、SPI等通讯接口[1,4]。
系统应用SR12内部的A/D进行阀门位置信号及输入控制信号的采集,利用PWM输出经过滤波后的位置信号,利用I2C总线与外部存储器AT24C08进行通讯存储设置值,利用SCI接口通过M AX485与上位机进行数据交换,充分利用了该芯片的内部资源,节约了成本。
2.1信号输入部分
利用SR12内部A/D转换,将输入的模拟信号和阀门位置反馈的模拟信号进行量化。采用REF02作为A/D的基准电压,其温度漂移系数为3PPM/℃。
2.2信号输出部分
SR12有3通道8位高速PWM,每个通道有独立的计数器,可选择PWM输入时钟以产生各种PWM 频率,并有自动相位控制。利用其中一路PWM作为模拟量输出信号,其余两路作为电 机控制信号。同时选择I/O口PTB6作为继电器开关量输出的控制信号。
2.3输入输出隔离
系统在工业现场使用时,涉及到各种仪表、传感器及执行机构,会由于各种原因引入信号干扰以及各种危险的强电压信号。为了保证系统的安全,保证检测的正确性和运行的可靠性,采用光耦LOC210对输入输出信号进行隔离,如图2所示。
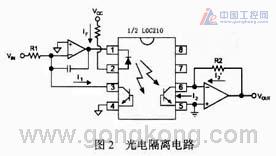
图2中,左侧有CPU系统的数字地,右侧有外部系统的地。同时,外部系统的电源与内部系统的电源完全隔离。
2.4通讯部分
为了完成工业现场远程控制和组网的需要,系统支持 RS485通讯方式。电平转换芯片采用MAX485。实际工作时,可以与上位机进行远程通讯,进行运行方式设定并监控运行状态。
2.5电机驱动部分
电机的驱动采用电力电子开关双向可控硅BTA16。双向可控硅具有开关速度快、寿命长、无火花和拉弧现象等特点[2],保证执行机构在高温条件下的长期可靠运行,同时有助于对电机的保护。主电路与CPU之间采用光耦MOC302X驱动,如图3所示,图中ZL为电机负载。
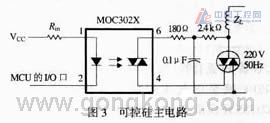
在设计中,MOC3020的二极管前向电流为15 mA,MOC3021和MOC3023分别为8 mA和3 mA,所以可以由MC68HC908SR12的I/O口采用灌电流方式直接驱动。在实际工作时RC吸收回路的实际参数需要根据电机参数(ZL)的不同确定。
需要注意的是,MOC302X的耐压是400 V,如果电机需要工作在380 V下或者电机的反电势比较大时,要选用MOC308X系列。
3 软件设计
控制器的软件主要是由主程序、人机界面处理程序及自动调试、故障处理、A /D转换和数据处理、手动操作故障处理等子程序组成。主程序流程如图4所示。
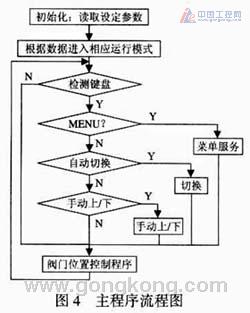
在执行过程中,判断各种故障状态,发现故障,立即报警显示,同时输出一组继电器开关量信号给用户,并切断电机电源。
系统采用4个键复用的方法实现对系统的控制及参数设定。4个键的定义分别为F(Function)、U(Up)、D(Dowm)、S(Shift)。F为功能键,按此键进入设置菜单,多次按F键后可退出 菜单。U、D键分别代表增加和减小当前数值或进行参数选择,在手动操作中代表向上或向下指令。S为切换键,可以改变当前输入焦点,配合U、D键,可以很方便的实现任意数字的输 入。
在电机控制算法上采用PID调节,避免了超调、振荡的发生,同时可选直接比例控制和比例+步进控制等控制方式,使系统能适用不同类型的电机。
系统的软件设计使得可随时调整阀门两端位置,只要调整好限位开关后作一次自整定(F、S键同时按下10 s)即可,极大地方便了用户。系统还提供RS485通讯协议,用户可以通过上 位机编程控制阀门,使阀门联网通讯及计算机控制更加方便。
4 结束语
该系统的各个主要功能模块集中在单片微处理器中,降低了系统的成本,提高了可靠性,减小了体积,可直接安装于执行器内部而无需改动原机械机构,这不仅方便了现有执行机构的生产,也有利于原有旧设备的改造。同时,系统的硬件设计充分考虑了工业现场的环境情况,采取了完善的抗干扰措施和故障保护措施,使系统能适用于工业现场的环境。
该系统已实际投产,目前在各种工业环境下运行良好。
参考文献
[1]张友德.M68HC08系列单片机原理与应用[M].上海:复旦大学出版社,2001.
[2]王兆安.电力电子技术[M].北京:机械工业出版社,2001.
[3]张卫华.电动阀门智能测控系统的研制[J].青岛大学学报,2003,16(3):79-82.
关键词:阀门电动执行机构;智能控制器;MC68HC908SR12
The design of an intelligent controller for use with electric valveactuators
ZHU Rongrong,ZHANG Shiwen;SHU Guohua
(Electrical & Electronic Techonlogy Center of Shanghai Jiaotong University,Shanghai 200240,China)
Abstract:An intelligent controller is designe d for use with electric valveactuators.The controller uses the 8bit MCU as a control unit and the power electronics as a motordrive unit.The system is pro vided with the integrated function of automatic and manual control and can also detect the state of the valve.The system is applicable to many kinds of industri al valve.
Key words:electric valveactuator;intelligent controller;MC68H C908SR12
0 引言
水、汽、油等流体与工业发展有着密切联系,而流体在工业上的应用离不开管网系统,有管网必然有阀门。随着工业自动化的发展,传统的手工机械调节方式在许多场合已不再适用。要实现管网系统的工业自动化管理,更是离不开电动阀门这个管网系统中的执行机构。在某些应用场合,对阀门的控制不仅仅是简单的开关控制,还涉及到开度控制以及流量等各种关 系控制,这对阀门电动执行机构控制器的智能性提出了更高的要求。文中应用微处理器设计了一种阀门控制系统实现了阀门执行机构控制的智能化。
1系统工作原理和功能
阀门的控制量为阀门开度,在应用场合往往会根据实际需要将阀门开或关,或者开到一定程度,甚至动态的以某种规律开关。在传统的模拟控制方式中用时间、电流的大小来表示阀门的开启角度。由于影响时间、电流(电压)等参数的因素很多,因此显示的开启角度与阀门的实际位置不易达到同步,经常出现明显的误差[3]。同时,简单的模拟量控制提供的信息极为有限,不利于系统的调试和检修。笔者设计的智能型控制系统采用数字化的方法来控制电动执行机构运行。其智能控制器系统构成如图1所示。
采用MOTOROLA公司单片微处理器和外围芯片组成智能化的位置控制单元,接收统一的标准直流信号(如4~20 mA的电流信号),经信号处理及A/D转换送至微处理器,微处理机将处理后的数据送至显示单元显示调节结果,运算处理后产生的控制信号驱动交流电机。此外,系统带通讯功能,可以接收上位机的指令,进行远程数字控制。同时也可以在智能控制器本地的人机界面上通过菜单和按钮实现现场手动控制。
主要功能描述:
(1)一体化结构设计,直接接收4~20 mA/4~12 mA/12~20 mA/0~5 V/1~5 V等控制信号,输出隔离的4~20mA阀位反馈信号;
(2)具有仿真运行功能,并可根据用户设定的流量特性曲线运行;
(3)控制信号断路故障判断、报警及保护功能。断路故障时可使执行机构或开、或关、或保特、或在0~100%之间预置的任意值;
(4)数字显示,显示控制信号值、阀位值、故障类别;
(5)RS485远程通讯功能,通过通讯协议在上位机进行编程组态,对过程量、开关量作数据或图形处理。
(6)阀门行程自整定,输入输出模拟信号自校准。
2 系统硬件组成
智能控制器根据智能化、可靠性高、抗干扰能力强、成本低等原则,控制核心采用8位微处理器MC68HC908SR12(SR12),电机控制的主电路采用电力电子技术实现。SR12具有速度快、功能强和价格低等特点。其最高工作频率可达8 MHz,有512字节的片内RAM、12K字节的片内FLASH存储器,14路10位A/D,及SCI、I2C、SPI等通讯接口[1,4]。
系统应用SR12内部的A/D进行阀门位置信号及输入控制信号的采集,利用PWM输出经过滤波后的位置信号,利用I2C总线与外部存储器AT24C08进行通讯存储设置值,利用SCI接口通过M AX485与上位机进行数据交换,充分利用了该芯片的内部资源,节约了成本。
2.1信号输入部分
利用SR12内部A/D转换,将输入的模拟信号和阀门位置反馈的模拟信号进行量化。采用REF02作为A/D的基准电压,其温度漂移系数为3PPM/℃。
2.2信号输出部分
SR12有3通道8位高速PWM,每个通道有独立的计数器,可选择PWM输入时钟以产生各种PWM 频率,并有自动相位控制。利用其中一路PWM作为模拟量输出信号,其余两路作为电 机控制信号。同时选择I/O口PTB6作为继电器开关量输出的控制信号。
2.3输入输出隔离
系统在工业现场使用时,涉及到各种仪表、传感器及执行机构,会由于各种原因引入信号干扰以及各种危险的强电压信号。为了保证系统的安全,保证检测的正确性和运行的可靠性,采用光耦LOC210对输入输出信号进行隔离,如图2所示。
图2中,左侧有CPU系统的数字地,右侧有外部系统的地。同时,外部系统的电源与内部系统的电源完全隔离。
2.4通讯部分
为了完成工业现场远程控制和组网的需要,系统支持 RS485通讯方式。电平转换芯片采用MAX485。实际工作时,可以与上位机进行远程通讯,进行运行方式设定并监控运行状态。
2.5电机驱动部分
电机的驱动采用电力电子开关双向可控硅BTA16。双向可控硅具有开关速度快、寿命长、无火花和拉弧现象等特点[2],保证执行机构在高温条件下的长期可靠运行,同时有助于对电机的保护。主电路与CPU之间采用光耦MOC302X驱动,如图3所示,图中ZL为电机负载。
在设计中,MOC3020的二极管前向电流为15 mA,MOC3021和MOC3023分别为8 mA和3 mA,所以可以由MC68HC908SR12的I/O口采用灌电流方式直接驱动。在实际工作时RC吸收回路的实际参数需要根据电机参数(ZL)的不同确定。
需要注意的是,MOC302X的耐压是400 V,如果电机需要工作在380 V下或者电机的反电势比较大时,要选用MOC308X系列。
3 软件设计
控制器的软件主要是由主程序、人机界面处理程序及自动调试、故障处理、A /D转换和数据处理、手动操作故障处理等子程序组成。主程序流程如图4所示。
在执行过程中,判断各种故障状态,发现故障,立即报警显示,同时输出一组继电器开关量信号给用户,并切断电机电源。
系统采用4个键复用的方法实现对系统的控制及参数设定。4个键的定义分别为F(Function)、U(Up)、D(Dowm)、S(Shift)。F为功能键,按此键进入设置菜单,多次按F键后可退出 菜单。U、D键分别代表增加和减小当前数值或进行参数选择,在手动操作中代表向上或向下指令。S为切换键,可以改变当前输入焦点,配合U、D键,可以很方便的实现任意数字的输 入。
在电机控制算法上采用PID调节,避免了超调、振荡的发生,同时可选直接比例控制和比例+步进控制等控制方式,使系统能适用不同类型的电机。
系统的软件设计使得可随时调整阀门两端位置,只要调整好限位开关后作一次自整定(F、S键同时按下10 s)即可,极大地方便了用户。系统还提供RS485通讯协议,用户可以通过上 位机编程控制阀门,使阀门联网通讯及计算机控制更加方便。
4 结束语
该系统的各个主要功能模块集中在单片微处理器中,降低了系统的成本,提高了可靠性,减小了体积,可直接安装于执行器内部而无需改动原机械机构,这不仅方便了现有执行机构的生产,也有利于原有旧设备的改造。同时,系统的硬件设计充分考虑了工业现场的环境情况,采取了完善的抗干扰措施和故障保护措施,使系统能适用于工业现场的环境。
该系统已实际投产,目前在各种工业环境下运行良好。
参考文献
[1]张友德.M68HC08系列单片机原理与应用[M].上海:复旦大学出版社,2001.
[2]王兆安.电力电子技术[M].北京:机械工业出版社,2001.
[3]张卫华.电动阀门智能测控系统的研制[J].青岛大学学报,2003,16(3):79-82.




 投诉建议
投诉建议
提交
查看更多评论
其他资讯

超越传统直觉,MATLAB/Simulink助力重型机械的智能化转型

新大陆自动识别精彩亮相2024华南国际工业博览会

派拓网络被Forrester评为XDR领域领导者

智能工控,存储强基 | 海康威视带来精彩主题演讲

展会|Lubeworks路博流体供料系统精彩亮相AMTS展会